
(2017-09-10)在短短的十幾年,大家就把無人車「訓練」到今天的驚人層級,加速了全面無人駕駛的進程。
(2017-09-10)Waymo 是無人駕駛汽車的新公司,原屬 GoogleX,後歸屬 Alphabet,現在是獨立公司,繼續 Google 無人汽車的研發。Google 無人駕駛汽車自從獲准在加州路試,已經跑了 300 萬哩(1哩=1.6公里),限於規定,無人駕駛車仍需要人坐在駕駛座,必要時手動駕駛,但 Waymo 的第四級 (Level 4) 無人車,就真的不需要人駕駛,因為車內只有座位,沒有可操控的器械。「大西洋」(The Atlantic) 雜誌記者日前參觀了「訓練中心」, 透露了訓練的經過,不是訓練人、是訓練車。
訓練分兩部分,一是電腦模擬的虛擬試車場,設在矽谷 Google 內部,另一個是實地試車場,設在東邊俗稱「中谷」的一個舊飛機場,上圖就是電腦模擬與實地試車場的搭配,模擬的結果下載到汽車裡,在實地檢驗效果。虛擬場設定各種情況,然後模擬車輛行駛的結果,做為研究改善的依據,陸地試車場佔地 100 英畝(0.4 平方公里),設計成專為試車的城市街道。
Carcraft 模擬建構程式。取自 extremetech.com。
建構模擬的電腦程式叫 Carcraft(上圖),設定街道的路況與車輛的流量,然後啟動電腦程式,看看這些無人車能怎麼自己開著走,這個系統一共模擬了25,000輛無人車,一共跑了25億哩,對不容易自動導航的地段,重複模擬上百次、上千次,找出究竟,找到好的方法。模擬開始運轉,就用另一監看電腦程式 XView(下圖)追蹤看看,無人車的表現。
XView 模擬運轉監看程式。取自 extremetech.com。
距舊金山兩個半小時的實地試車場,稱為「城堡」(Castle),是冷戰時期美國戰略空軍基地,後由當地政府接管,Google 承租 100 英畝做為無人車試車場,裝扮成有代表性的城市街道,有住宅區,高速公路,的死胡同、停車場,同時也可以為測試特殊情況更改裝扮,包括一台下雨機器,加州山區乾燥很少下雨,雨地行車是必要的測試。為了更接近實際情況,更收集了一些垃圾、警示三角錐、破自行車做為路障,看無人車怎麼反應。
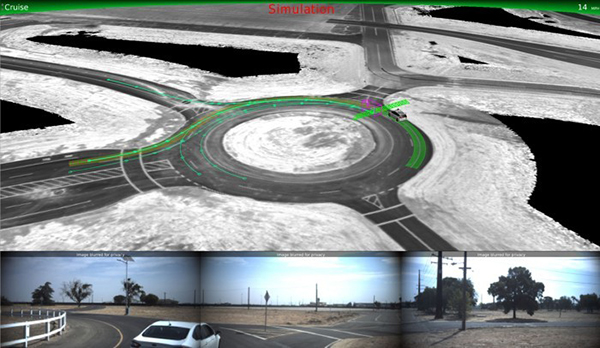
幾個月以前,無人車在德州路試的時候遇到了一個圓環,速度與情況的複雜,讓這輛無人車亂了手腳,所以工程師們就在試車場建造了一個圓環(下圖),把進出圓環各種情況電腦模擬的結果,用到實地圓環測試。電腦模擬的好處,可以把單一狀況變化成上千種狀況,快速的逐一測試,在實際街道上做不到。

「城堡」裡的圓環。取自 Atlantic 網站。
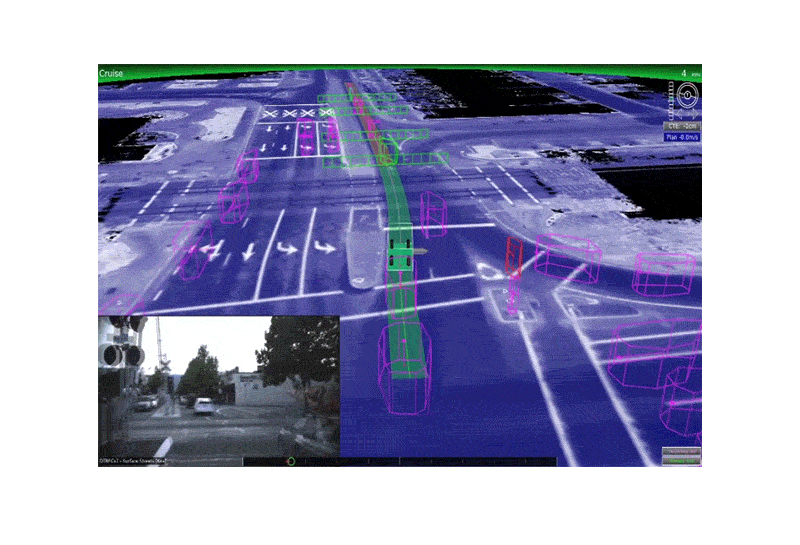
下圖是 XView 模擬試車場的圓環,電腦畫面是無人車「看見」的路況,最下面一小條是圓環的實際影像對照,也就是我們人眼看見的。無人車用雷達、照相機、雷射掃描器(LIDAR)來認路,辨別前面的物件,用色線條代表。XView 畫面上端有一個紅字 SIMULATION,意思是這個畫面不是重播,是模擬現場的「直播」,也就是無人車遇到的狀況要自行判斷,選擇最好的路線。
XView 模擬的「城堡」圓環。取自 Atlantic 網站。
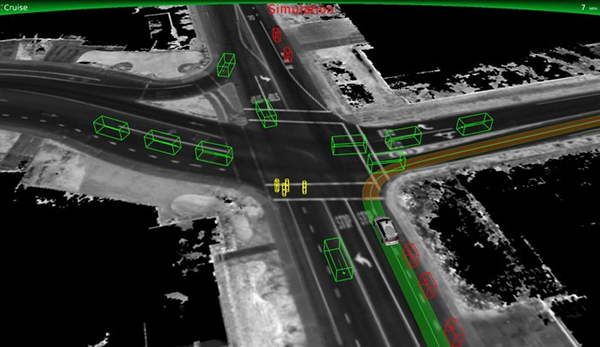
美國交通號誌有「停」(STOP) 的牌子,通常是在路口,車輛遇到要完全停穩,讓路給不「停」的路,這是一個讓駕駛人自發遵守的交通規則,在車流量不多的十字路口常會遇到,一個、兩個、甚至三個、四個路口都有「停」的牌子,沒有「停」牌子的路口有權先走,有「停」牌子的車則先到先走,如果同時到,則右邊的車輪流走。
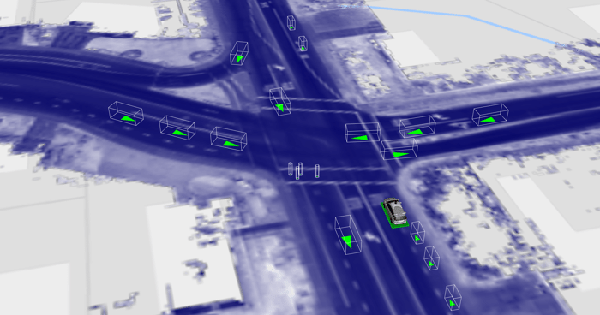
這個給人自由心證的設計,對無人車來說就成了一個難題,有一次無人車路試,「停」後左轉,遇到對面來了一輛自行車,就不知所措的停在路的中間。工程師們針對這個問題深入研究,找出 800 種不同「停」的組合,讓無人車遇到哪一種組合,採取哪一種對應步驟。下圖就是改善過的四個「停」十字路口,模擬與路試情況對照。
無人駕駛汽車的發展,要回塑到 2004 年美國「國防高等研究計劃署」(DARPA) 舉辦的無人車大挑戰,在內華達州沙漠 240 公里競賽,結果走的最遠的一輛無人車只走了不到 12 公里就不動了,所以 DARPA 接著舉辦 2005 年大挑戰,10 小時要走完 212 公里的沙漠道路,包括急轉彎、懸崖山路、隧道,結果史坦福大學隊以 6 小時 54 分走完獲勝。
2007 年 DARPA 改為城市挑戰,在加州一個舊飛機場設置了 96 公里長的街道,包括所有的交通號誌,以及不時有人開的車輛路過,製造真實的交通路況。無人車必須遵守所有的交通規則,安全的在 6 小時以內走完全程,結果 Carnegie Mellon 大學隊以 4 小時 10 分獲勝。
這三次競賽,都是各大學組隊參加,無疑給他們最好的訓練機會,所以讓無人車發出曙光,在短短的十幾年,大家就把無人車「訓練」到今天的驚人層級,加速了全面無人駕駛的進程。
圖片連結:
刊頭:美國西海岸太平洋風景
Google 的無人駕駛汽車是這麼認路的
Carcraft 模擬建構程式
XView 模擬運轉監看程式
「城堡」裡的圓環
XView 模擬的「城堡」圓環
改善過的四個「停」十字路口,模擬與路試情況比照
*本文取材自2017年8月30日「那福忠西海岸數位隨筆(21):訓練無人駕駛車」
對本文有任何看法,歡迎 eMail:frank.na@gmail.com 給作者,分享您對本文的看法。



{kind=link}
{kind=link}
{kind=link}